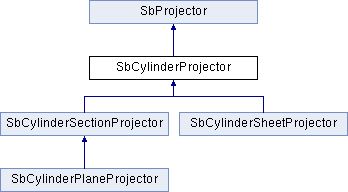
The SbCylinderProjector class is the abstract base class for mapping to cylindrical surfaces.
More...
#include <Inventor/projectors/SbCylinderProjector.h>
The SbCylinderProjector class is the abstract base class for mapping to cylindrical surfaces.
The cylinder projectors map 2D points to various surface types based on cylindrical shapes.
- See also
- SbSphereProjector
◆ SbCylinderProjector() [1/2]
| SbCylinderProjector::SbCylinderProjector |
( |
const SbBool |
orienttoeye | ) |
|
|
protected |
Default constructor sets up a cylinder along the Y axis with height 1.
◆ SbCylinderProjector() [2/2]
| SbCylinderProjector::SbCylinderProjector |
( |
const SbCylinder & |
cylinder, |
|
|
const SbBool |
orienttoeye |
|
) |
| |
|
protected |
Constructor taking an explicit cylinder projection definition.
◆ project()
◆ projectAndGetRotation()
Project the 2D point to a 3D coordinate on the cylindrical surface, and find the rotation from the last projection to this one.
- See also
- project(), getRotation()
◆ getRotation()
◆ setCylinder()
| void SbCylinderProjector::setCylinder |
( |
const SbCylinder & |
cylinderref | ) |
|
Set cylinder to project onto.
◆ getCylinder()
| const SbCylinder & SbCylinderProjector::getCylinder |
( |
void |
| ) |
const |
Returns projection cylinder.
◆ setOrientToEye()
| void SbCylinderProjector::setOrientToEye |
( |
const SbBool |
orienttoeye | ) |
|
Sets whether or not the projection surface should be oriented towards the eye of the viewer.
◆ isOrientToEye()
| SbBool SbCylinderProjector::isOrientToEye |
( |
void |
| ) |
const |
Returns the state of the cylinder orientation flag.
◆ setFront()
| void SbCylinderProjector::setFront |
( |
const SbBool |
infront | ) |
|
Set whether to intersect with the outside of the cylinder (isfront equal to TRUE), or the inside.
◆ isFront()
| SbBool SbCylinderProjector::isFront |
( |
void |
| ) |
const |
Returns value of the flag which decides whether to intersect with the outside or inside of the cylinder.
◆ isPointInFront()
| SbBool SbCylinderProjector::isPointInFront |
( |
const SbVec3f & |
point | ) |
const |
Check if point is on the frontside or the backside of the cylinder.
◆ setWorkingSpace()
| void SbCylinderProjector::setWorkingSpace |
( |
const SbMatrix & |
space | ) |
|
|
virtual |
Sets the matrix used for converting from the projector's coordinate system to the world coordinate system.
Reimplemented from SbProjector.
◆ intersectCylinderFront()
| SbBool SbCylinderProjector::intersectCylinderFront |
( |
const SbLine & |
line, |
|
|
SbVec3f & |
result |
|
) |
| |
|
protected |
Intersect line with the SbCylinderProjector::cylinder and place the intersection point (if any) in result. Considers setFront() settings.
Returns TRUE if line actually hits the cylinder, FALSE if it doesn't intersect with it.
◆ intersectFront
| SbCylinderProjector::intersectFront |
|
protected |
Flag which says whether or not we should map to the outside or inside of the cylinder surface.
◆ cylinder
| SbCylinderProjector::cylinder |
|
protected |
Specification of the projection cylinder.
◆ orientToEye
| SbCylinderProjector::orientToEye |
|
protected |
Which direction the cylindrical surface is oriented.
◆ needSetup
| SbCylinderProjector::needSetup |
|
protected |
◆ lastPoint
| SbCylinderProjector::lastPoint |
|
protected |
Stores the previously projected 3D point.
The documentation for this class was generated from the following files:
 Public Member Functions inherited from SbProjector
Public Member Functions inherited from SbProjector